Time Series Prediction Part I
2022-07-21
Time Series
- Clustering
- Segmentation
- Classification
- Anomaly/Outlier Detection
- Imputation
- Forecasting
- Trajectory prediction
- Stock Market prediction
- Univariate
- Multivariate
- Zerovariate
“Prediction is the essence of intelligence, and that’s what we’re trying to do.”
– Yann LeCun (2015)
“Prediction is very difficult, especially if it’s about the future!”
– Niels Bohr
“What we can’t predict, we call randomness.”
– Albert Einstein
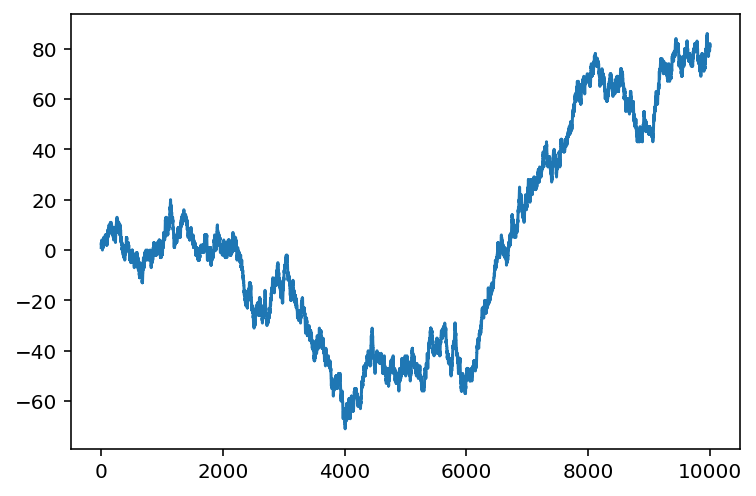
Understanding Randomness 1
- Random walk
-
cumulative sum of random numbers
![]()
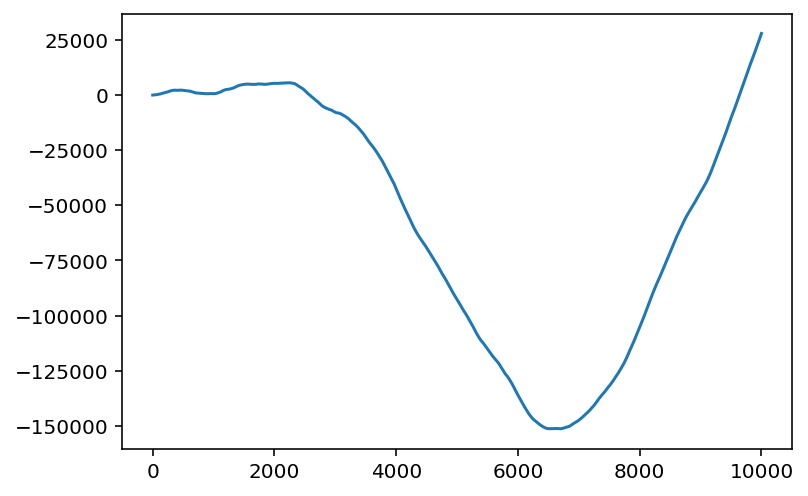
Understanding Randomness 2
- Walk of random walk
-
cumulative sum of a random walk
Pearson correlation coefficient \(r\)
![]()
- Measures linear correlation between two sets of data
- Equal to the slope of a linear regression model (for standardized data \(\sigma_x=\sigma_y=1\))
\[
\hat{y} = \phi_0 + \phi_1 x = \phi_0 + \frac{cov(x,y)}{\sigma_x^2} x = \phi_0 + r \frac{\sigma_x}{\sigma_y} x
\]
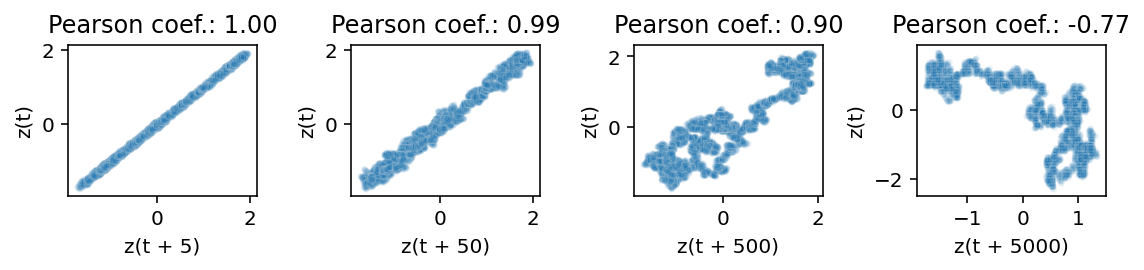
Autocorrelation 1
Pearson coefficients between time series and time shifted version of itself
Autocorrelation 2
- ACF (auto correlation function) of non-stationary data decreases slowly
- random walk is non-stationary
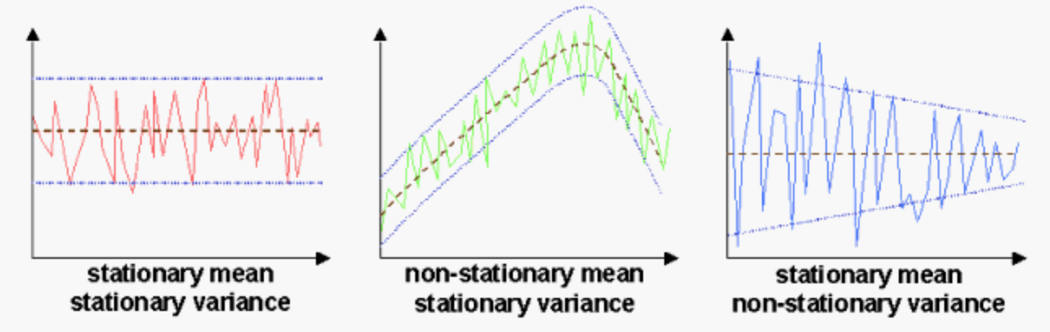
Stationarity
Statistical properties don’t change over time
![]()
- A stationary time series has no seasonality or trend.
- Many tools, statistical tests and models (ARIMA!) rely on stationarity.
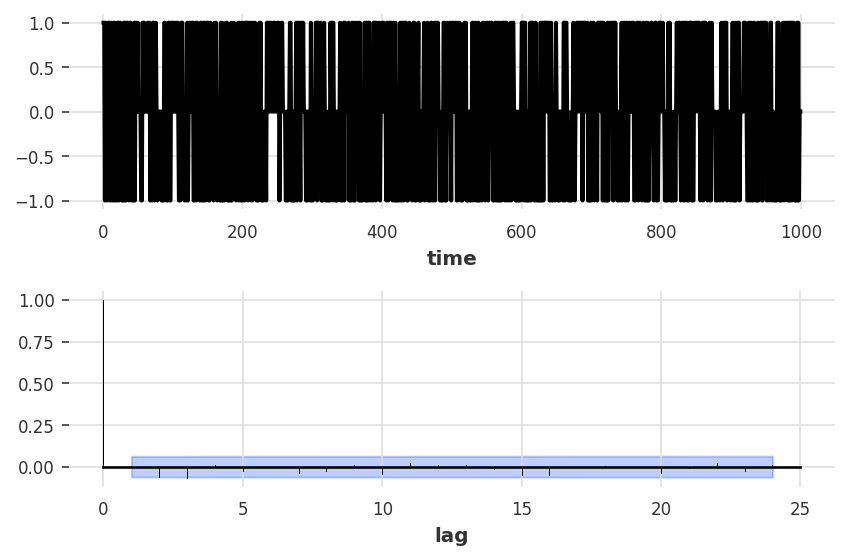
Differencing
![]()
- Differencing of degree \(d\) can help to stabilise the mean eliminating/reducing trend and seasonality.
- Transformations such as logarithms can help to stabilise the variance
- ACF is zero for first derivative of random walk
Partial autocorrelation 1
- Direct linear correlation \(r_k\) between \(y\) and \(x_k\) \[
\hat{y} = \phi_0 + 0 \cdot x_1 + ... + r_k x_k
\]
- Partial correlation \(p_k\) between \(y\) and \(x_k\) \[
\hat{y} = \phi_0 + \phi_1 x_1 + ... + p_k x_k
\] Dependency on \(x_1, x_2, ...\) is absorbed into \(\phi_1, \phi_2, ...\)
Partial correlation is linear correlation between \(y\) and \(x_k\) with indirect correlation to \(x_1, x_2, ...\) removed.
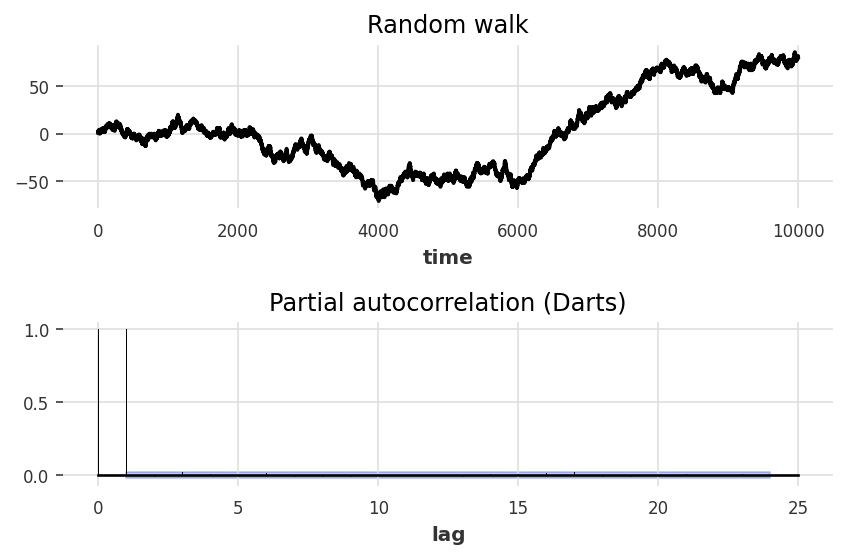
Partial autocorrelation 2
![]()
- PACF (Partial autocorellation function) is zero for random walk except for lag 1
Autoregression model
- forecast \(y_t\) using a linear combination of past values \[
\hat{y}_t = \phi_0 + \phi_1 y_{t-1} + \phi_2 y_{t-2} + ... + \phi_p y_{t-p}
\]
- Autoregression means linear regression with lagged version of itself (similar to autocorrelation)
- AR(p) means \(\phi_0, ..., \phi_p \neq 0\)
- Autoregressive process can be used to generate data from random white noise \(\epsilon_t\) and fixed parameters \(\phi_k\) \[
y_t = \epsilon_t + \phi_0 + \phi_1 y_{t-1} + \phi_2 y_{t-2} + ... + \phi_p y_{t-p}
\]
- For \(\phi_0 = 0\) and \(\phi_1=1\) an AR(1) process is a random walk
Moving average model
- The name “moving average” is technically incorrect
- Better would be lagged error regression
- forecast \(y_t\) using a linear combination of past forecast errors \[
\hat{y}_t = \theta_0 + \theta_1 \epsilon_{t-1} + \theta_2 \epsilon_{t-2} + ... + \theta_q \epsilon_{t-q}
\]
- MA(q) cannot be fitted like an ordinary least square (OLS), because the forecast errors are not known
- Example algorithm: Set initial values for \(\theta_k\) and \(\epsilon_k\), then
- For i=1..N do
- Compute error terms for all \(t\): \(\epsilon_t\) = \(y_t - \hat{y}_t\)
- Run a regression of \(y_t\) against \(\hat{y}_t\) and update \(\theta_k\)
- Repeat
- Like(?) Iteratively_reweighted_least_squares or similar iterative process to estimate \(\theta_k\)
ARIMA
- Autoregressive integrated moving average model combines AR(p), differencing/integrating I(d) and MA(q) \[
\hat{y}_t = c + \phi_1 y^{(d)}_{t-1} + ... + \phi_p y^{(d)}_{t-p} + \theta_1 \epsilon_{t-1} ... + \theta_q \epsilon_{t-q}
\]
| ARIMA(0,1,0) |
Random Walk (with drift) |
| ARIMA(0,1,1) |
simple exponential smoothing ETS(A,N,N) |
| ARIMA(1,0,0) |
discrete Ornstein-Uhlenbeck process |
- To find the best fitting ARIMA model one can use the Box-Jenkins-Method
Box-Jenkins Method
- Make the time series stationary (e.g. standardization, differencing \(d\)-times, …)
- Use ACF plot and PACF plot to identify the parameter \(p\) and \(q\)
- Fitting the parameters of the ARIMA(p,d,q) model. This can be done with Hannan–Rissanen (1982) algorithm
- AR(m) model (with \(m > max(p, q)\)) is fitted to the data
- Compute error terms for all \(t\): \(\epsilon_t\) = \(y_t - \hat{y}_t\)
- Regress \(y_t\) on \(y^{(d)}_{t-1},..,y^{(d)}_{t-p},\epsilon_{t-1},...,\epsilon_{t-q}\)
- To improve accurancy optinally regress again with updated \(\phi,\theta\) from step 3
Other algorithms (maximizing likelihood) are often used in practice
- Statistical model checking (analysis of mean, variance, (partial) autocorrelation, Ljung–Box test of residuals)
- Once the residuals look like white noise, do the forecast
Nowadays all these steps are automated by tools like AutoARIMA etc.
Why???
Why combine AR and MA ?
AR is analogeous to linear regression, but what is MA analogeous to outside of time series analysis?
Why is ARIMA better than AR alone?